东北大学第三届RoboMaster校内赛圆满结束
2020-01-09
东北大学第三届RoboMaster校内赛圆满结束
通讯员:肖佳宁
东北大学第三届 RoboMaster 校内赛由全国大学生机器人大赛 RoboMaster 组委会主持举办,其主要目的是促进大学生提高自身科技创新能力,结合各学科优势培养创新人才。本届校内赛由东北大学创新创业学下属T-DT创新实验室承办, 是DJI大疆创新为高校提供的针对理工科工程技术人才培养的一个机器人比赛项目。校内赛是一个较RoboMaster 大师赛投入更少,但是任务量更加紧凑的工程思维培养计划,能有效的帮助参赛学生把理论知识转化为实践成果,加深对所学知识的理解同时提升动手能力。学生以团队的形式参赛也有利于增强项目统筹及团队配合意识与能力,增强集体荣誉感。

图1.校内赛宣讲
9月16日,T-DT创新实验室在东北大学科学馆进行了宣讲。宣讲会现场座无虚席,校内赛负责方为同学们系统的介绍了相关事项与流程,使同学们对RoboMaster校内赛有了更具体的认识。在提问环节同学们纷纷踊跃发言提问,对此次大赛非常积极热情。
9月24日,在结束报名后校内赛负责方开展了三期线上培训,按照组别进行分类,第一次机械技术培训主要为solidworks 构图基础培训,包括其基本使用,以及3D 打印基本技巧等相关知识。第二次电控基础培训主要为stm32 基础功能介绍,以及如何快速上手stm32 开发,MDK5 常见错误处理。第三次为视觉方案建议,针对比赛规则对大家视觉提一些建议与指导,帮助参赛队员解决问题。同时校内赛负责方还安排了线下答疑环节,以便及时和同学们沟通,为大家答疑解惑。
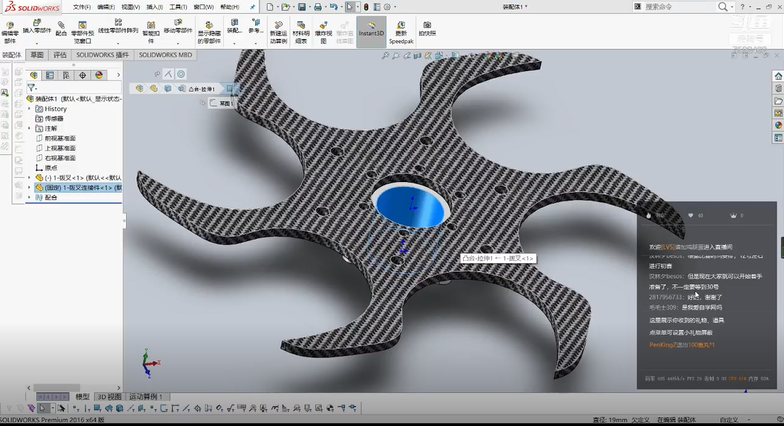
图2.线上培训

图3.线下答疑
在赛前,校内赛负责方积极进行比赛宣传。实验室撰了写有关本次活动宣传稿件,发送到学院贴吧、新浪微博、微信平台、各类科技创新论坛、以及学院官方网站,并且积极联系各学院学生会等组织平台以及多个校内媒体,全方位多角度进行宣传。同时组织了包括微信、微博、QQ 等社交平台互动抽奖赢取战队周边的线上活动以增加活动热度。此外也联系各专业各年级辅导员老师在其所在官方年级群内发布并宣传比赛信息以及创建官方校内赛答疑交流群,为同学们了解校内赛提供多种渠道,最大化的将比赛信息及时有效的在校园内传递。同时,实验室运营组的同学进行了海报条幅等的设计、制作,并在各大教学楼门口、餐厅食堂以及活动广场等设点进行线下宣传。由宣传部负责联系校方将宿舍(食堂)所设播放器内容更换为RM比赛视频并进行校内赛宣传。

图3.现场布置
机器人对抗赛竞赛规则:
1.比赛时间规定3分钟。
2.每支参赛队拥有1台半自动机器人,非半自动区域(启动区和巡线区)中采用自动,半自动区域(放块区和对抗区)可自行决定使用手动或者自动。
3.裁判吹哨示意开始比赛后,机器人才能启动离开启动区,参赛队员回到场地外的准备区。
4.比赛开始后,比赛过程中最多允许一名队员进行复位及操控工作。
5.采用记分制。得分方式有三种
(1)启动区有5个蓝色得分块,机器人需要把得分块运输到放块区,每成功取到一个得分块得10分,放块区分为两边,一边是简单放块区,此区域与地面平齐,在此区域放一个块得5分(手动)/10分(自动);另一边是困难放块区,此区域比地面高出100mm,在此区域放一个块得10分(手动)/15分(自动)。
(2)从启动区到对抗区有一条指定路线,机器人需要巡线从启动区运动到对抗区,完成巡线计10分。放块区在对战区的两侧,机器人在完成巡线后可以选择自动或者手动的方式把蓝色得分块放入放块区。
(3)对抗区中央放置有5个红色得分块,机器人可以通过某种动作使红色得分块落入对方的对抗区中,机器人结构每次只允许与一个红色得分块发生交互,每个落入对方对战区的红色得分块计5分(手动)/10分(自动)。
(4)参赛队员认定己方比赛结束后需要向裁判示意,从而结束己方计时。
(5)比赛过程中,机器人全部投影落入场外视为本次挑战失败。
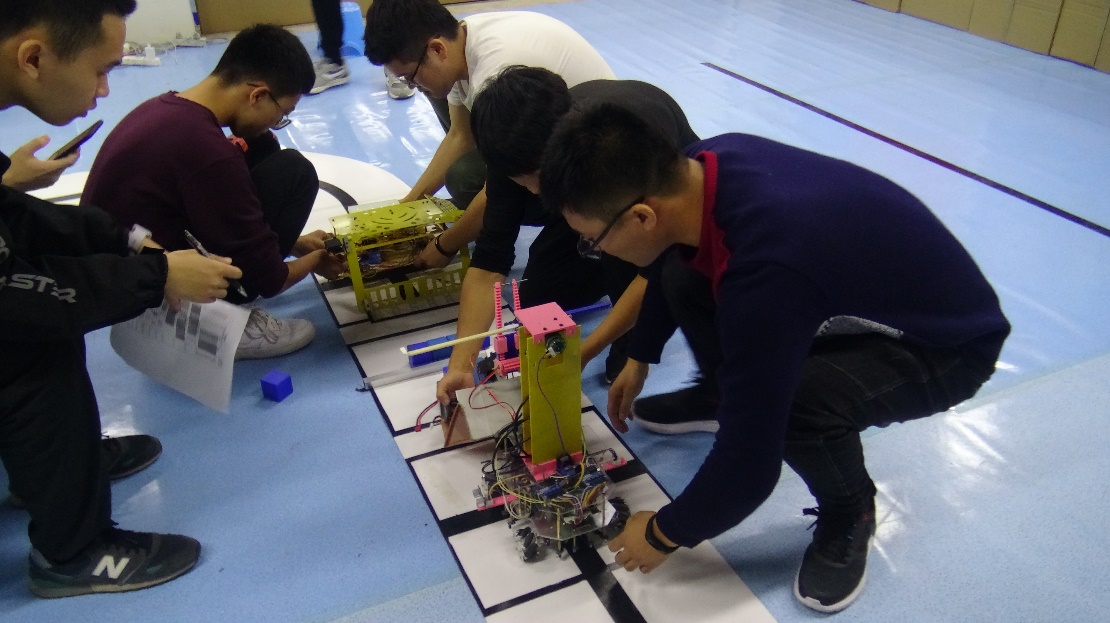
图4.参赛作品
自动瞄准赛比赛规则:
在云台前方随机位置放置若干块装甲板,参赛队伍需要用相机识别装甲板并使激光照射在装甲板上,即可得分(激光在一块装甲板上停留2s即视为锁定)。锁定每个装甲板得为10*装甲板距云台距离(单位:米)分,装甲板带有数字,若可以按照数字顺序依次锁定装甲板(按照数字顺序锁定目标数量大于等于4即可),则所得分数为总分*2。装甲板目标一共分为5个固定靶和一个移动靶。锁定移动靶(激光需要在移动装甲板上连续停留2.5s)得分为90分。
装甲板距离分为1m,2m,3m,4.5m,6.5m
移动靶距离为4m
获胜条件:以分数顺位排名,分数相同用时少者获胜。
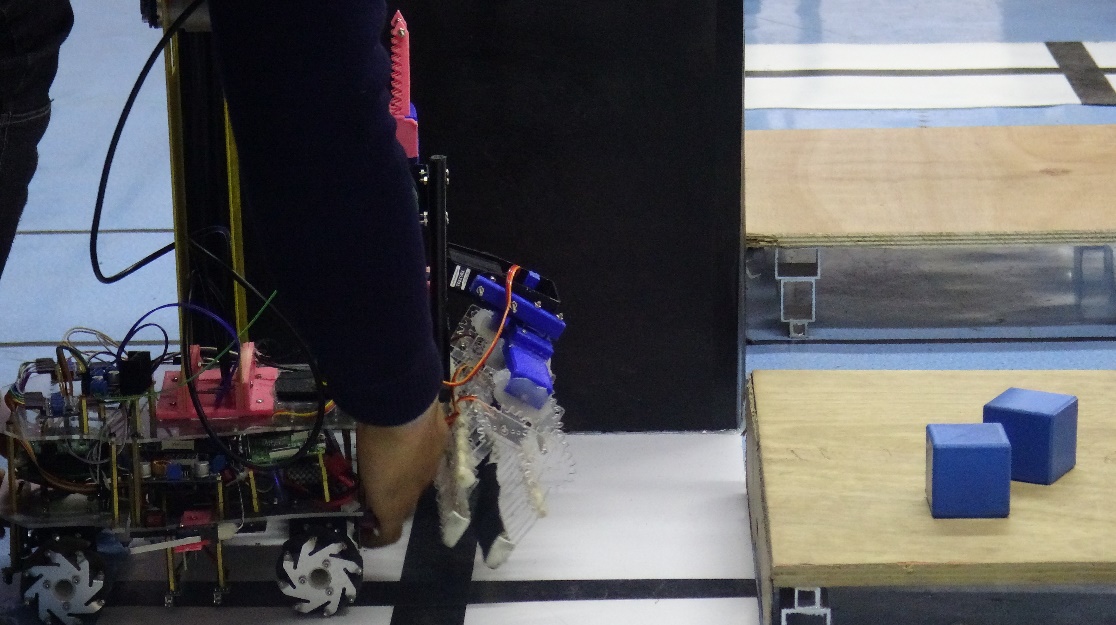
图5.参赛作品
19日首先进行小组赛,采取循环赛制,胜积一分,负不得分,最终按照小组积分进行排名,每组前两名出线。如若积分相同,按照比赛所耗费的总时间判定排名,耗费时间少的队伍排名靠前,如若耗费时间相同,按照参赛队机器人重量判定排名,重量轻的队伍排名靠前。

图6.比赛现场
20日进行决赛,得分标准与小组赛相同。采取双败赛制决出四强,然后进行冠亚军争夺战。
图7.决赛现场(裁判)
本次比赛宣传范围广泛,学生参与度很高。报名参赛的东北大学本科学生队伍达到60余支,总人数超过200人,覆盖了包括机械,自动化,计算机,软件,信息,资土等相关专业。在参赛队成员的培养和能力锻炼上也有了很大进步。其中进入决赛的队伍均自主设计完成了参赛作品,并可以完成基础的巡线任务。大家团结协作,很好的体现了团队的力量与朝气。本次比赛也提升了我们RoboMaster机甲大师赛和东北⼤学T-DT创新实验室在校内的知名度,为以后的发展打下了良好的基础。

图8. 颁奖现场
东北大学RoboMaster 校内赛已是举办的第三届,每一届都有新的突破与进步。通过本次大赛,学生的创新能力和工程实践能力大大提升,更加深入了解了RoboMaster的比赛与东北大学T-DT团队。与此同时,大大促进大学生科技竞赛活动的发展,培养出了一批具有创新精神和探索意识的优秀人才。

图9.备场区
对于这次校园赛我们仍有需要改进总结的地方
1、 在选择时间方面提前做好安排,避免与学校其他·大型活动冲撞,也可以邀请本地其他高校中学相关企业来参观增加人流量增加影响力
2、 重视参赛队伍的质量,并且再发放物资前进行一定的考核,一边筛选出质量更高的队伍
3、 不忘初心,砥砺前行