RM 2019 萝卜开会-如何像优秀程序员一样写嵌入式“Bug”精彩问答
2018-11-28

本报记者小R 11月23日晚电,RoboMaster 2019赛季第六期《萝卜开会——如何像优秀程序员一样写嵌入式“Bug”?》
直播于北京时间11月23日晚8时准时开播,本期主讲人为RM嵌入式工程师超萌pin。
直播过程中,嘉宾为我们系统地讲解了嵌入式的方法论,以及解答了本期节目过程中的一些观众提问。小R为大家总结了部分精彩问答如下:
1. 如何解决陀螺仪yaw轴漂的问题?
目前采用去零漂的方式,采集一段静止的陀螺仪输出数据,计算平均值,去除零漂。
2. Yaw漂移大家有啥好方法呀?换个传感器吗?用现成的融合好的?
去陀螺仪零漂,目前视频中只用板载mu6500陀螺仪和加速度计出来的,无其他传感器。
3. 关于版本控制有什么好方法呀?写的人多了就很乱。
可以使用git进行本地版本控制,多人同时进行控制可能需要搭服务器,大家可以上网参考一些相关教程。
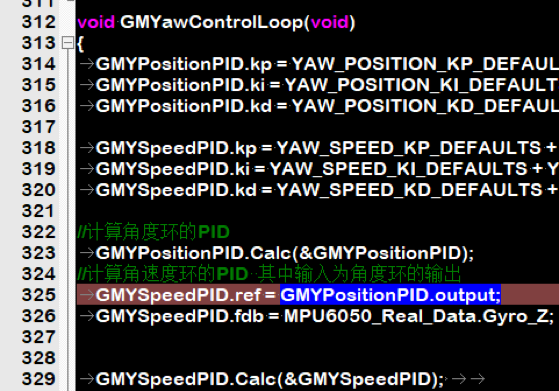
4. 串级pid怎么写呢,内环外环咋用?
串级pid是角度环为外环,角速度环为内环。使用看成两个PID进行调试,其中外环的输出是内环的输入。官方开源步兵代码中,controlTask.c的文件中,有串级PID示例,大家可以参考使用。
5. 想问下官方陀螺仪加磁力计了吗?
没有,只用了MPU6500。
6. 底盘速度闭环有必要吗?
步兵,英雄有必要。因为存在跑不直的现象,跑着跑着就歪了,但其他体积大的机器人如英雄,工程,云台没有yaw的自由度可能存在PID调节超调的问题导致操作体验不好。请对比各方面的考虑确定,推荐有射击功能的机器人具有速度环以及这是一个软件需求,可以比对测试看效果决定。