ICRA 2017 DJI RoboMaster Mobile Manipulation Challenge Rules
2017-02-21
ICRA 2017 DJI RoboMaster Mobile Manipulation Challenge Rules Supplementary Instructions
The ICRA 2017 RoboMaster ICRA Mobile Manipulation Challenge (MMC) is a worldwide robotics competition, jointly hosted by the DJI RoboMaster Organizing Committee (RMOC) and the Institute of Electrical and Electronics Engineers (IEEE) International Conference on Robotics and Automation (ICRA).
In order to help competing teams better understand the ICRA 2017 rules, the RMOC has announced the following supplementary instructions based on the ICRA 2017 DJI RoboMaster MMC Rules, issued worldwide in November 2016. These supplementary instructions have the same authority as the previously issued rules.
I. Competition Field:
1. The size of the competition field for the DJI 2017 RoboMaster Mobile Manipulation Challenge is 5000×5000 mm, covered by a gray non-slip rubber mat beneath wood-based flooring. The Base and Starting Areas are marked with blue and red lines as shown below:
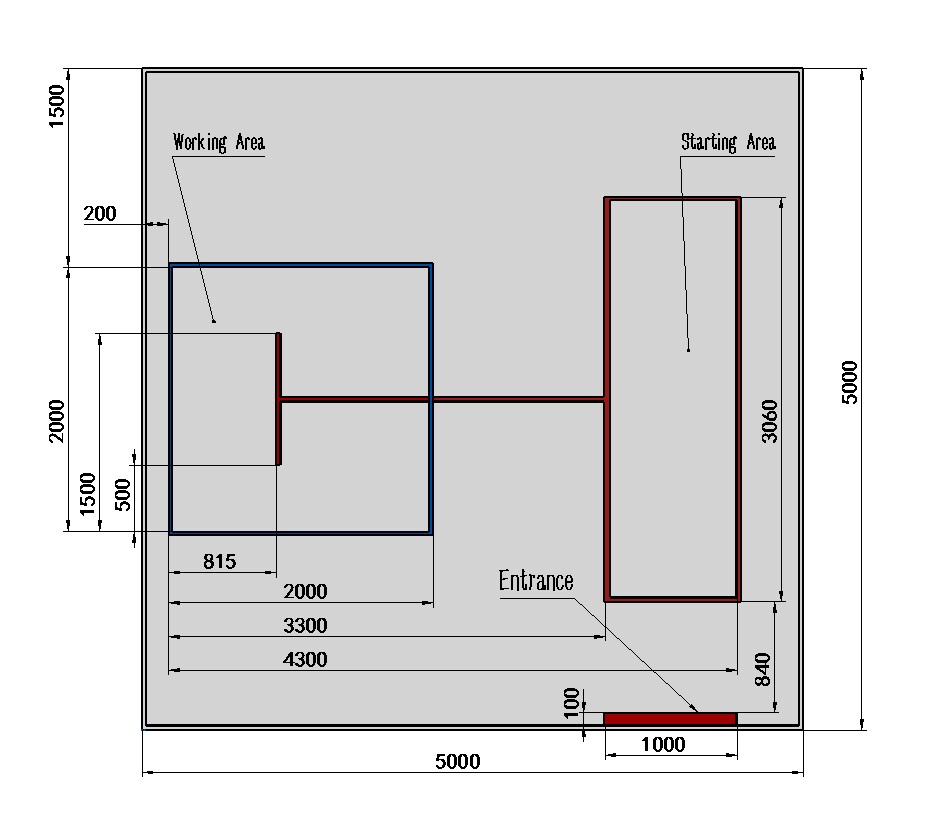
Figure 1: Top view of the competition field
Note: Figures are in millimeters (mm)
2. The size of a building block is 200×200×200 mm, made of EVA, with a hardness of 45°. There is a hole with a diameter of 115 mm and depth of 150 mm on one side of the building block. Below is an example:
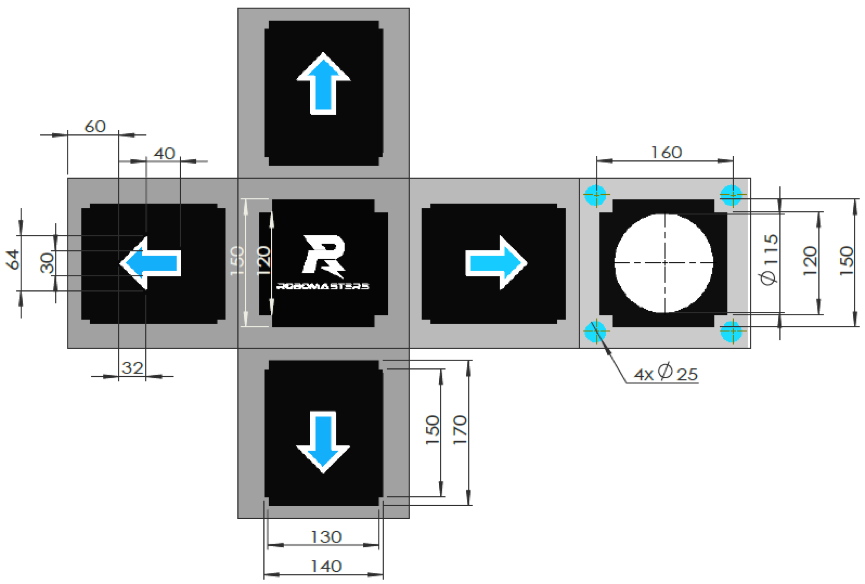
Figure 2: building block diagram
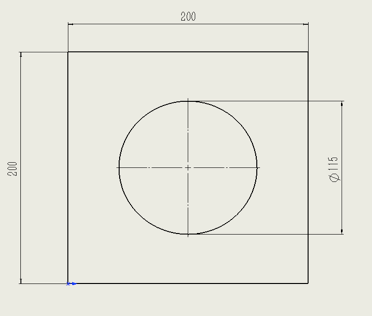
Figure 3: front view of the bottom of a building block
Note: Figures are in millimeters (mm)
II. Energy Requirements
Only two types of energy force can power ground robots: electricity and air. Fuel-powered engines, explosive substances, and dangerous chemical materials are strictly prohibited. If robots fail to meet these energy requirements, they will fail to pass the pre-competition check.
For air-powered robots, compressed air must not exceed 0.8Mpa. All compressed air safety shut-off valves must have barometers and protection measures in place to prevent cut-off.
Competing teams must set a master switch to remotely power off their robots and ensure that switches function normally throughout the competition, guaranteeing the safety of all on-site competitors and staff. All teams must present the normal function of the master switch. A referee has the right to terminate the game in the event of an emergency.
III. Outstanding Performance Prize Criteria for winning the Outstanding Performance Prize:
1. Team that has created a 1.2m-tall structure using no more than 10 blocks;
2. If more than one team complete the task, the one with the highest score wins;
3. If two teams complete with the same highest score, the team with the lightest robots (recorded by the RMOC during the pre-competition check) wins.
Please Note: Only teams that build a structure higher than 1.2m (and only when the number of blocks under 1.2m is ten or less) are eligible for the Outstanding Performance Prize. Other blocks in the field will not be calculated as one of the ten main building blocks.
Example: if a team builds a 1.4m tall structure with 15 building blocks, and the total number of blocks connected under 1.2m height is eight, the team is eligible for the final prize.
IV. Standard Robot Guidelines
Teams whose Technical Proposals are approved will receive free RM Standard robots from the RMOC. According to their actual needs, teams can decide whether to use, disassemble, or develop eligible robots independently.
The RM Standard robot consists of four brushless motors with reduction gears, two gimbal motors (brushless and direct-drive), two motors for friction wheels (non-inductive brushless), and one pulling motor (DC-geared motor). The chassis motors and gimbal motors are controlled via CAN-BUS, and the rest of the motors are directly controlled by the main controlling board.
RM Standard robots use an STM32-based control system. No code is burned into any of the robots given to teams. Teams must burn codes on their own. For specific instructions, please refer to “RM Standard Robot Platform Code”. Keil uvision5 software makes up the integrated compiling environment and the SCMs used in these robots are produced by STMicroelectronics. The main controlling board can be seen once the gimbal lid is opened.
The main functions of the code include:
1) Controlling the robots to move, including forward/backward/left/right and spinning in place;
2) Enabling keyboard control when the remote controller is connected to a computer;
3) Cannon system control.
V. Prompt
Teams who fail to pass the Technical Proposal can still prepare for the challenge as long as those teams submit their Technical Reports within the required time and with approval. Teams are only eligible for the challenge when their Technical Reports have been approved.
Each team participating in any ICRA 2017 activity must register team information on the official ICRA 2017 website and pay related fees. For more information, please visit: http://www.icra2017.org/registration-and-travel/registration
Attachments:
RM standard robot platform code Part 1
RM standard robot platform code Part 2